اسپید کنترل چیست ؟ اسپید کنترل در واقع درایور برای راه اندازی موتور های براشلس می باشد . موتور های براشلس بخاطر ساختار داخلی و سیم پیچ ثابت و شیوه طراحی به صورت مستقیم با ولتاژ DC راه اندازی نمی شود و برای راه اندازی آن نیاز به یک درایور دارد . از موتور های براش لس برای ساخت کوادکوپتر ، گیمبال و شناور و … استفاده می شود و این نوع موتور ها بخاطر عدم استفاده از براش برای انتقال ولتاژ دارای عمر زیاد و سرعت بالایی هستند .
در این پست میخواهیم درباره شیوه درایو کردن موتور های براشلس و عملکرد اسپید کنترل مطالبی را بررسی کنیم . در دوره آموزش ساخت کوادکوپتر به صورت عملی از اسپیدکنترل و موتور براشلس برای ساخت کوادکوپتر و ربات پرنده استفاده شده است .
اسپید کنترل چیست؟
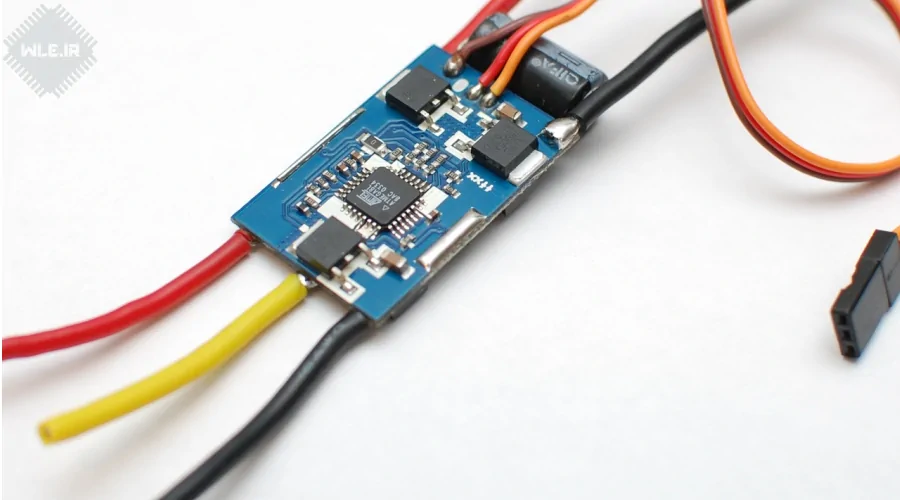
همان طور که در بالا اشاره شد اسپید کنترل Electronic Speed Control یا به اختصار ESC درایور برای راه اندازی موتور های براشلس یا همان موتور های بدون براش می باشد . از اسپید کنترل برای درایو کردن موتور های براسلش استفاده می شود ، راه اندازی موتور های براشلس کار چندان آسانی نیست و نیاز به یک الگوریتم پیچیده دارد ، در کل یک موتور براشلس بدون سنسور که از آن برای ساخت کوادروتور استفاده می کنیم دارای سه سیم به اسم های A ، B و C است .
شیوه ساخت و نحوه کارکردن موتور براشلس
یک موتور براشلس دارای 3 سیم می باشد . سیم ها با عنوانین A ، B و C نام گذاری می شوند . برای راه اندازی یک موتور براسلش باید به این شیوه عمل شود :
- A و B تغذیه و C تعیین موقعیت روتور
- A و C تغذیه و B تعیین موقعیت روتور
- B و C تغذیه و A تعیین موقعیت روتور

حالت های بالا کلی هستند و شرایط خاص و جابه جایی بین مثبت و منفی تغذیه در نظر نگرفته شده است ، وقتی تغذیه A و B وصل شد ، سیم C موقعیت روتور را تعیین می کند و پردازنده میکرو از همان طریق میزان چرخش و زمان قطع و وصل ها را تشخیص می دهد ، البته این که گفته شد نمای کلی و ساده شده ی کار کرد موتور براشلس بود ، برای هرچرخش و سرعت گیری نیاز به محاسبات پیچیده و دقیق است که در اینجا از بیان انها صرف نظر می کنیم قسمت درایو یک اسپید کنترل از 6 عدد ماسفت قدرت تشکیل شده است که کار های بالا را انجام می دهد و یک پردازنده هم برای سازمان دهی و محاسبات مورد استفاده قرا میگیرد .
در ویدئوی زیر که از یوتیوب برداشته شده با شیوه ساخت یک موتور براشلس آشنا می شوید
اسپید کنترل چگونه کار می کند
قسمت درایو یک اسپید کنترل از 6 عدد ماسفت قدرت تشکیل شده است که کار های باال را انجام می دهد و یک پردازنده هم برای سازمان دهی و محاسبات مورد استفاده قرا میگیرد .
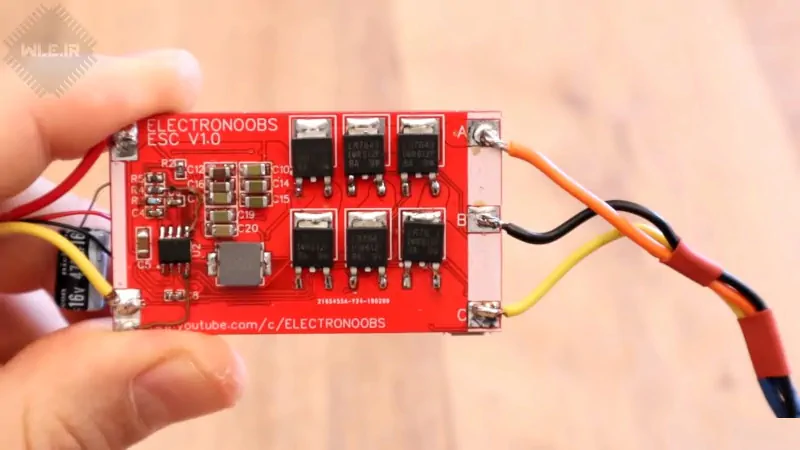 نحوه اتصال ماسفت ها به شکل زیر می باشد و توسط یک پردازنده عملیات کنترل صورت می پذیرد . همچنین باید ماسفت های مناسب انتخاب کنیم تا تحمل جریان مد نظر را داشته باشد .
نحوه اتصال ماسفت ها به شکل زیر می باشد و توسط یک پردازنده عملیات کنترل صورت می پذیرد . همچنین باید ماسفت های مناسب انتخاب کنیم تا تحمل جریان مد نظر را داشته باشد .
شکل زیر نمای یک موتور براشلس را نشان می دهد
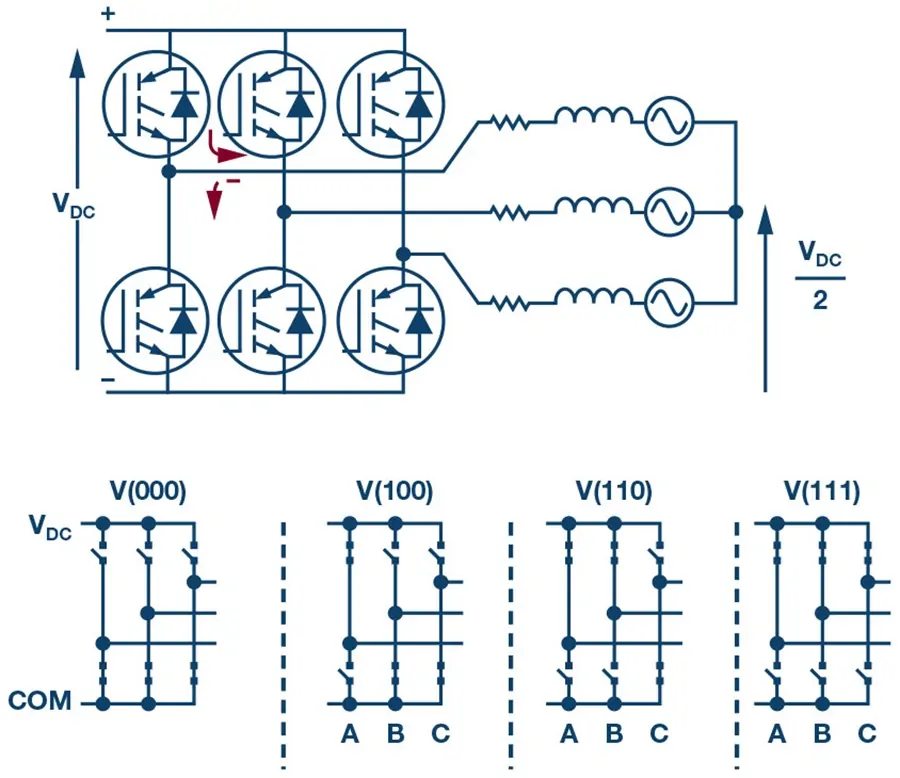
در مدار بالا می بینید برای اینکه موتور یک دور کامل بچرخد ، ماسفت ها به چه شکلی باید عمل کنند و کدام یک از آن ها صفر و کدام باید یک باشد .
در صورتی که ساخت اسپید کنترل برای شما جالب است و دوست دارید یک اسپید کنترل را به صورت عملی آموزش دهید در بخش کامنت ها اعلام کنید تا در یک پست جدید آموزش عملی ساخت یک اسپید کنترل رو برای شما قرار دهیم .