در این پکیج، آموزش ساخت ربات تعادلی دو چرخ روش ساخت ربات تعادلی دو چرخ را که میتواند به صورت عمودی روی دو چرخ خود متعادل بماند و سقوط نکند، بیان می کنیم. برد کنترل این ربات علاوه بر اینکه باعث حفظ تعادل ربات می شود، کنترل ربات از راه دور توسط موبایل را نیز ممکن می سازد. بنابراین قادر هستیم ربات را به صورت بی سیم توسط اپلیکیشن طراحی شده برای آن کنترل کنیم و به جهات مختلف حرکت دهیم.
توضیحات پکیج آموزشی ساخت ربات تعادلی دو چرخ
علاوه بر حرکت ربات تعادلی دو چرخ از راه دور، توسط اپلیکیشن طراحی شده برای ربات، میتوان ربات را از راه دور تنظیم کرد و با تغییر مقدار پارامترهای کنترلی به صورت بی سیم، عملکرد آن را بهینه کنیم که این قابلیت در مواردی که اقدام به تغییر قطعات ربات مانند موتورها یا فریم ربات میکنیم بسیار کارآمد و مهم است. در پکیج آموزشی ساخت ربات تعادلی دو چرخ روش ساخت این ربات آموزش داده می شود و فایلهای لازم جهت ساخت ربات در اختیار کاربر قرار داده خواهند شد.
قابلیتها و ویژگیهای ربات تعادلی
- متعادل ماندن روی دو چرخ
- مقاومت در برابر ضربات و نیروهای خارجی
- کنترل و حرکت ربات به صورت بی سیم توسط موبایل
- قابلیت حرکت روی سطوح ناهموار
- قابلیت حرکت روی سطوح شیبدار
- قابلیت حرکت روی سطوح نرم مانند فرش
- مانیتورینگ پارامترهای ربات به صورت بی سیم
- تنظیم و بهینه کردن عملکرد ربات به صورت بی سیم توسط موبایل
- مشاهده ی تغییرات در ربات به صورت Real Time
- محافظت از باتری در مقابل تخلیه شدن بیش از حد
طرز کار ربات تعادلی دو چرخ:
برای اینکه ربات بتواند تعادل خود را حفظ کند و سقوط نکند، چرخهای ربات باید در جهت کج شدن یا سقوط کردن ربات حرکت کنند. یعنی در صورتیکه ربات به سمت جلو خم شد یا هل داده شد، چرخها به سمت جلو حرکت کنند و در صورتیکه ربات به سمت عقب خم شد یا هل داده شد، چرخها به سمت عقب حرکت کنند.
ظاهرا مساله بسیار ساده است اما جهت رسیدن به تعادل در این دست از رباتها، باید با پارامترهای زیادی کلنجار رفت و در عمل مساله بسیار پیچیده تر از چیزی هست که به چشم می آید.
دلیل پیچیدگی رباتهای تعادلی دو چرخ هم این است که این رباتها به صورت ذاتی کاملا ناپایدار هستند. در حقیقت رباتهای تعادلی دو چرخ، یک سیستم چند-متغیره و غیر خطی دارند. بنابراین به یک سیستم کنترلی Real Time و کارآمد نیاز داریم که ترتیبی دهد تا در هر لحظه تعادل ربات حفظ شود.
قابلیتها و ویژگیهای اپلیکیشن
- کنترل ربات از راه دور به صورت بی سیم
- مشاهده ی مقدار ظرفیت باقیمانده ی باتری ربات
- قابلیت ارسال تنظیمات برای ربات به صورت بی سیم
- قابلیت تنظیم پارامترهای حلقه ی کنترلی به صورت بی سیم
- قابلیت تنظیم سرعت حرکت ربات
- قابلیت تنظیم سرعت چرخش ربات
- مشاهده ی تاثیر تغییر پارامترها در ربات به صورت real time
- قابلیت تغییر پوسته ی برنامه
- کنترل ربات از طریق جوی استیک
- کنترل ربات از طریق کلیدها
- ذخیره سازی تنظیمات در حافظه
ویدیوهایی از نحوه ی عملکرد ربات تعادلی دو چرخ
فیلم بهبود عملکرد ربات و حلقه های کنترلی به صورت بی سیم(دانلود ویدیو با کیفیت بالا)
چند نمونه ربات تعادلی دو چرخ
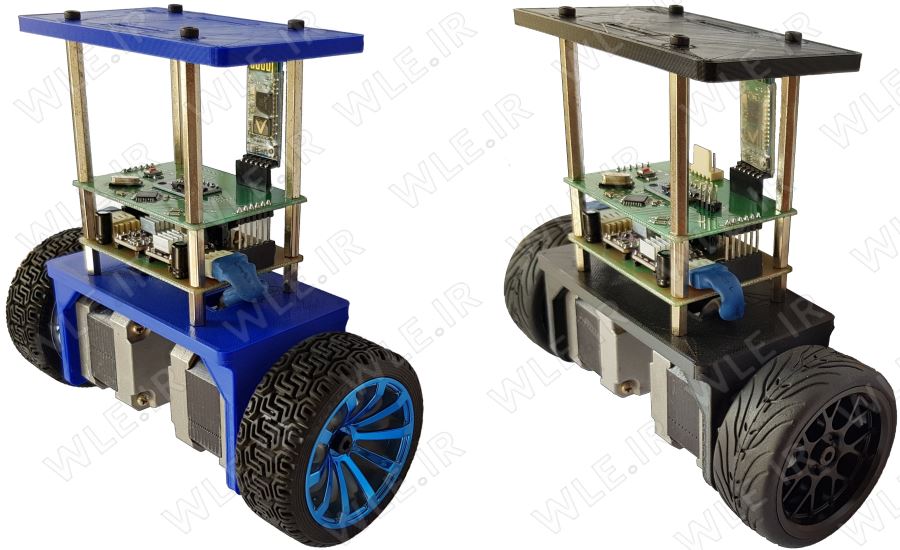
پکیج آموزشی ساخت ربات تعادلی دو چرخ
تصاویری از اپلیکیشن ربات self balancing

تصاویری از اپلیکیشن ربات self balancing

تصاویری از اپلیکیشن ربات self balancing
محتوای پکیج آموزشی
آموزشهای پکیج ربات تعادلی دو چرخ
-
آموزش کانفیگ برد درایور ربات
-
آموزش پروگرم کردن برد کنترل ربات
-
آموزش راه اندازی و کانفیگ برد کنترل ربات
-
معرفی کامل قطعات موردنیاز جهت ساخت ربات
-
آموزش مونتاژ کامل ربات و راه اندازی آن
-
آموزش کار با اپلیکیشن اندرویدی ربات
فایلهای قرار داده شده در پکیج ربات تعادلی دو چرخ
-
فایل آلتیوم PCB برد کنترل و برد درایور
-
فایل PDF برد کنترل و برد درایور
-
لیست کامل قطعات برد کنترل و برد درایور
-
فایل هگز میکروکنترلر
-
فریم ربات جهت پرینت 3 بعدی
-
اپلیکیشن ربات
-
تصاویر ربات
-
سایر نرم افزارهای موردنیاز