سلام دوستان عزیز تصمیم به اموزش ساختن ربات مسیر یاب ساده ای کردم که اگه خدا بخواد در طول چند روز تکمیلش می کنیم . تو اینترنت سرچ کردم اما اکثر سایت ها یا ناقص توضیح دادن یا مطالبو از سایت های دیگه به سایت خودشون کپی کردن که اصلا قابل درک نیست . در اینجا ما سعی می کنیم یک ربات ساده 4 سنسور رو به کمک هم بسازیم و اگه مفید بود ربات حرفه ای تر رو طراحی می کنیم
خب بریم سر اصل مطلب :
هر ربات مسیریاب از یک بخش مکانیکی و یک بخش الکترونیکی و برنامه نویسی که به حافظه میکرو داده میشه تشکیل شده است .
برای ساختن یک ربات مسیر یاب به قطعات زیر احتیاج داریم :
1 – دو عدد موتور گیربکس دار
2 – دو عدد چرخ ربات و یک هرزه گرد ربات
3 – یک برد سوراخ دار (برای سوار کردن قطعات روی آن)
4 – چهار عدد گیرنده مادون قرمز و چهار عدد فرستنده مادون قرمز ( سنسور های ربات )
5 – چهار عدد پتانسومتر 20 کیلو اهم ( یا بیشتر ) و چهار عدد LED با رنگ دلخواه
6 – هشت عدد مقاومت 330 اهم و چهار عدد مقاومت 220 اهم
7 – یک عدد آیسی LM324 و یک عدد درایور L293D
8 – یک عدد میکروی AVR Atmega 8
9 – یک سوکت 14 پین و یک سوکت 16 پین و یک سوکت 23 پین ( برای ایسی ها )
10 – یک باطری لیتیومی ( اختیاری )
11 – چسب و …
برای دیتاشیت قطعات هم از همین سایت استفاده کنید . دیتاشیت همه ایسی ها و سنسور های لازم موجود هستند اگر هم جایی گنگ بود یا به راهنمایی و یا اطلاعاتی احتیاج داشتید در قسمت نظرات مطرح کنید.
قسمت یک : اطلاعات پایه ای
راه اندازی سنسور مادون قرمز
شکل سنسور گیرنده مادون قرمز

شکل سنسور گیرنده مادون قرمز
——————————————————————————————————————-
شکل فرستنده مادون قرمز

شکل فرستنده مادون قرمز
———————————————————————————————————–
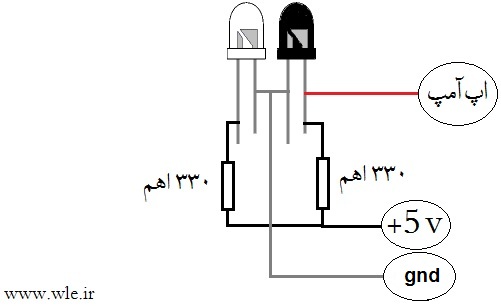
هیشه پایه بلند پایه مثبت است و پایه کوتاه تر پایه منفی . برای ساختن یک سنسور مادون قرمز باید طبق شکل زیر فرستنده و گیرنده رو کنار هم قرار بدیم و مانند ان سیم ها را ببندیم ( مقاومتی که به پایه گیرنده وصل میشه باید 10 کیلو اهم باشه که اشتباها در شکل زیر 330 است )
آموزش ساخت ربات مسیر یاب
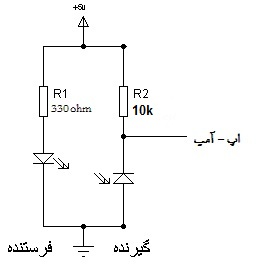
پایه ی بلند گیرنده رو به پایه ی کوتاه فرستنده وصل می کنیم و ان ها را به منفی وصل می کنیم . به پایه کوتاه گیرنده و پایه ی بلند فرستنده یک مقاومت 330 یا 220 وصل می کنیم و آن را به مثبت 5 ولت وصل می کنیم . سپس از پایه گیرنده که به آن مقاومت وصل شده یک سیم بیرون می اوریم که سیم اصلی و اشکار ساز سیاه و سفید محیط است .ان را به + یا – اپ آمپ (lm324) وصل می کنیم
اینم شکل استاندارد مدار بالا
آموزش ساخت ربات مسیر یاب
——————————————————————————————————————————
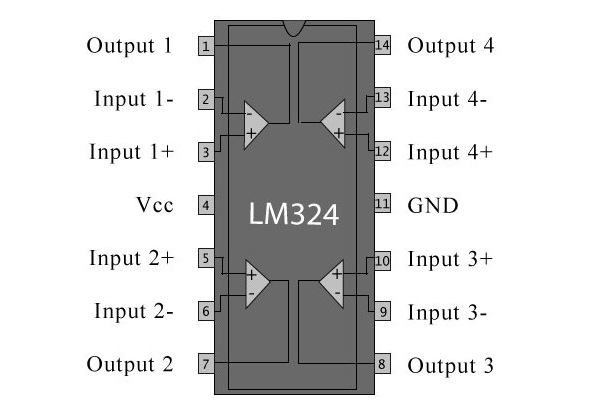
الان باید خروجی گیرنده که تو شکل بالا با (اپ آمپ) مشخص شده رو به ایسی lm324 وصل کنیم . هر ایسی lm324 چهار (اپ آمپ) داره که می تونیم چهار تا سنسور رو باش فعال سازی کنیم و چون ربات ما از 4 سنسور تشکیل شده یک ایسی کافیه .
به دیتاشیت lm324 دقت کنید
آموزش ساخت ربات مسیر یاب
تو این ایسی 4 آپ امپ وجود داره هر اپ آمپ از یک خروجی (output) و دو ورودی (input) که یکی + و یکی – است تشکیل شده است . وردی مثبت را به سنسور و ورودی منفی را پتانسیومتر وصل میکنیم و خروجی را پردازشگر وصل می کنیم .
توجه : میتوانید جای مثبت و منفی را با هم عوض کنید . فقط حساسیت ان به سفید و سیاه معکوس میشود .
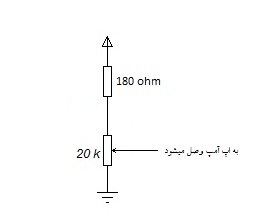
برای بستن پتانسیو متر می توانید از مدار زیر استفاده کنید .
آموزش ساخت ربات مسیر یاب
حالا اگه مدار های بالا رو با هم ترکیب کنیم مدار زیر بدست می آید
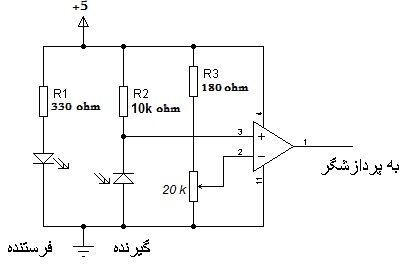
آموزش ساخت ربات مسیر یاب
این مدار برای یک سنسور است ، باید به تعداد سنسور های ربات مدار بالا را پیاده سازی کنیم .
توجه : برای اینکه از کار کرد هر سنسور اگاه شودید به خروجی اپ آمپ یک عدد led وصل کنید وصل کنید و به پایه منفی led یک مقاومت 180 کیلو اهم وصل کنید و ان را به منفی متصل کنید.
چینش سنسور ها :
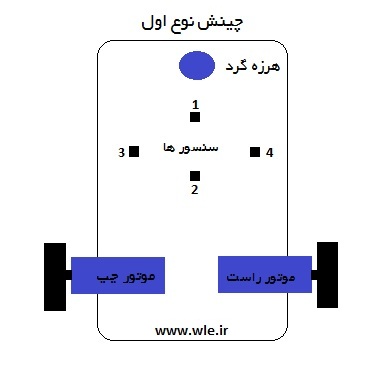
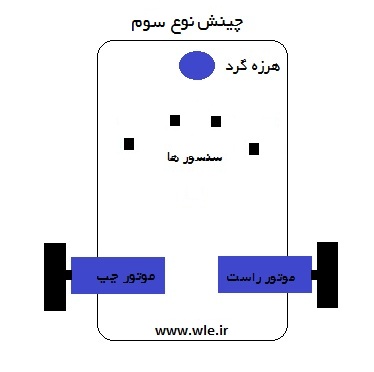
حالا که به نحوه فعال سازی سنسور های ربات اشنا شدیم میریم به سراغ چینش سنسور ها و مکان قرار گیری موتور ها . سه چینش زیر رو می توانیم با توجه به 4 سنسوری بودن ربات استفاده کنیم که دو چینش اول برنامه نویسی یکسانی لازم دارند و چینش نوع سوم به برنامه دیگری با توجه به نوع چینشش نیاز دارد .
چینش نوع اول:
آموزش ساخت ربات مسیر یاب
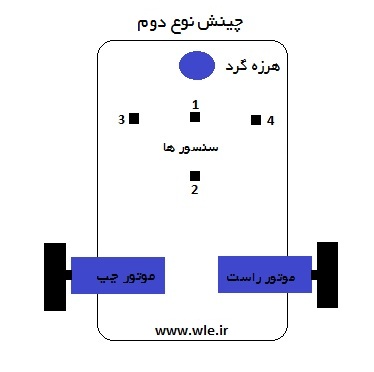
چینش نوع دوم :
آموزش ساخت ربات مسیر یاب
چینش نوع سوم :
آموزش ساخت ربات مسیر یاب
برای این اموزش چینش نوع دوم رو انتخاب می کنیم .
وقتی سنسور ها را مطابق شکل دو بستید و سنسور ها را به ورودی lm324 وصل کردید چهار خروجی از ایسی lm324 خواهیم داشت (چهار پایه گوشه ها) که مربوط به سنسور های 1 ، 2 ، 3 و 4 میشن . باید این چهار خروجی رو به ورودی پردازده وصل کنیم و از پردازنده دو خروجی میان بیرون که این دو خروجی یکی رو به موتور چپ و یکی رو به موتور راست وصل می کنیم .