در دوره آموزش عملی ساخت کوادکوپتر حرفه ای به زبان ساده یاد خواهید گرفت یک ربات پرنده بسازید، فرقی نمی کند کوادکوپتر باشد یا هگزا کوپتر یا اوکتا کوپتر ، از یک ربات ساده گرفته تا یک ربات حرفه ای که دارای خلبان خودکار ، فرود خودکار ، دارای سیستم GPS و سیستم تصویر برداری است را فراخواهید گرفت .
در دوره آموزش ساخت کوادکوپتر قمت های مهم مانند رادیو کنترل ، ایر فریم ، فلایت کننترل ، گیمبال و بسیاری از بخش ها مهم به صورت کامل ساخته می شود تا هزینه ساخت یک کوادکوپتر به حداقل برسید . دوره آموزش ساخت کوادکوپتر جامع و کاربردی است و هم کابران مبتدی و هم کاربران حرفه ای می توانند از آن استفاده کنند به عنوان مثال برای ساخت کوادکوپتر یک رادیو کنترل لازم هست برای تهیه رادیو کنترل دو راه وجود دارد یا می توانیم از نمونه های آماده و تجاری که در بازار به فروش می رسد استفاده کنیم یا می توانیم خومان یک رادیو کنترل بسازیم .
رادیو کنترل در دوره آموزش ساخت کوادکوپتر
افراد مبتدی ترجیع می دهند که رادیو کنترل آماده را تهیه کنند و افراد حرفه ای دوست دارند حتی رادیو کنترل هم دست ساز و ساخته خودشان باشد . در این آموزش هر دو مورد آموزش داده شده است و افراد بر اساس علاقه خود و یا بر اساس هزینه یکی را انتخاب کنند . اینکه نمونه آماده تهیه کنیم بسیار هزینه زیادی دارد ولی دردسر آن کم است ولی ساخت یک رادو کنترل دردسر های خودش را دارد ولی هزینه ها را بسیار بسیار کاهش می دهد و هم اینکه باعث می شود کار حرفه ای باشد .

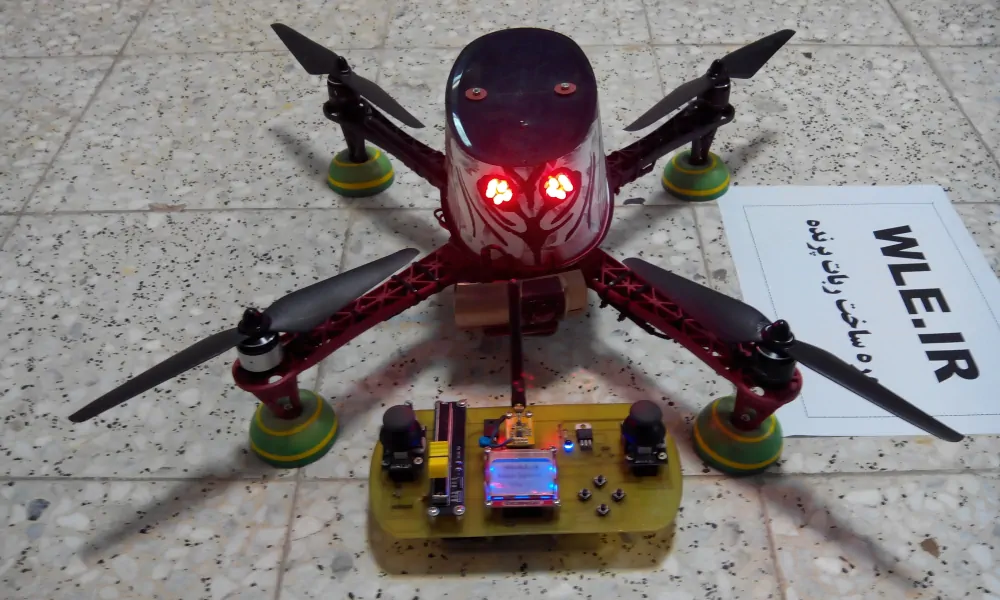
در تصویر زیر رادیو کنترل ساخته شده طبق آموزش های ما را مشاهده می کنید .
رادیو کنترل های تجاری موجود بردهای محدودی دارند و معمولا کمتر از 500 متر کار می کنند ولی در این رادیو کنترل که توسط سرزمین الکترونیک طراحی شده ، برد بالای 2500 متر است ، بعضی از کاربرای دوره با خوش ذوقی تقویت کننده هایی به مدار بالا اضافه کرده اند که برد عملیاتی را بسیار بسیار بالا برده اند که در زیر یک نمونه را مشاهده می کنید .

در دوره آموزش ساخت کوادکوپتر بسیاری از بخش های کوادکوپتر توسط تیم سرزمین الکترونیک طراحی و پیاده سازی شده است و همه مطالب اختصاصی و تست شده هستند . تک تک آموزش ها اختصاصی و 100 درصد عملی هستند و بدون هیچ نگرانی می توانید از مطالب دوره آموزش ساخت کوادروتور استفاده کنید .
ایرفریم یا بدنه در دوره آموزش ساخت کوادکوپتر
بخش مهم دیگری در کوادکوپتر بدنه یا همان ایرفریم کوادکوپتر می باشد که در این دوره ما هم آموزش ساخت ایر فریم محکم را ارائه داده ایم و هم از نمونه های آماده استفاده کرده ایم که کاربر بر اساس نیاز و اهداف خود می تواند یکی را انتخاب کند .
در زیر شما تصاویر فریم آموزش داده شده ما را می بینید که کاربران دوره کوادکوپتر از آن استفاده کرده و تصاویر آن را برای ما ارسال نموده اند .
و در زیر تصویر یک ایر فریم آماده فیبر کربن رو مشاهده می کنید که یکی از کاربرای دوره آموزش ساخت کوادکوپتر از آن استفاده کرده است .

گیمبال و تصویربرداری در کوادکوپتر
در دوره آموزش ساخت کوادروتور به صورت کامل به همه بخش های جانبی کوادکوپتر پرداخته شده است و تا حد امکان سعی شده است که هزینه ها کاهش پیدا کند و کیفیت ارتقا پیدا کند . به عنوان مثال سیستم تصویر برداری و نصب دورین کاملا شرح داده شده است و مدار ارسال و دریافت تصویر آموزش داده شده است و سیستمم کنترل دوربین یعنی گیمبال توسط سرزمین الکترونیک طراحی شده و پیاده شده است . دوربین و سیستم های ارسال تصویر را معرفی کرده ایم
در زیر تصاویر کوادکوپتر کاربران دوره را مشاهده می کنید که طبق آموزش ها پیش رفته و سیستم تصویر برداری و دوربین و گیمبال رو ساخته اند .

فلایت کنترل کوادکوپتر
در دوره آموزش ساخت کوادروتور ، انواع فلایت کنترل های موجود در بازار مانند multiwii ، KK ، QQ Super ، KK PRO ،APM و بسیاری دیگر آموزش دداده شده اند و به صورت کامل به وسیله آن ها کوادکوپتر طراحی کرده ایم . شیوه کانفیگ و راه اندازی و نحوه سوار کردن روی فریم توضیح داده شده و معایب و مزایای آن ها بیان شده است . همچنین برای کاهش هزینه به صورت دستی فلایت کنترل مولتی وی را طراحی کرده ایم که هزینه ساخت را بسیار پایین می آورد و برای آن دسته از دوستانی که حرفه ای هستند ساخت و برنامه نویسی یک فلایت کنترل اختصاصی و ساده را آموزش داده ایم .
دوره آموزش عملی ساخت کوادکوپتر به زبان ساده
در گالری تصاویر زیر می توانید نمونه های از ارسالی کاربران را ببینید