ماژول MPU6050، ترکیبی قدرتمند از شتابسنج و ژیروسکوپ ۶ محوره، یکی از محبوبترین ابزارها برای پروژههای الکترونیک و رباتیک است. این سنسور کوچک قادر است شتاب و چرخش را با دقت بالا اندازهگیری کند و در کاربردهایی مثل رباتهای تعادلی، پهپادها، واقعیت افزوده و نظارت بر حرکت بدرخشد. اما برای دستیابی به دادههای دقیقتر، استفاده از فیلتر کالمن ضروری است که دادههای خام شتابسنج و ژیروسکوپ را بهصورت هوشمندانه ترکیب میکند. در این آموزش جامع، شما را با مراحل راهاندازی MPU6050 با آردوینو و پیادهسازی فیلتر کالمن برای محاسبه زوایای دقیق آشنا میکنیم. اگر آمادهاید تا پروژههای خود را به سطح بالاتری ببرید، با ما همراه شوید!
تفاوت ژیروسکوپ و شتابسنج چیست؟
در دنیای سنسورها، ژیروسکوپ و شتابسنج دو عضو جدانشدنی برای اندازهگیری حرکت و موقعیت هستند. هرچند هر دو بهنوعی اطلاعات حرکتی ارائه میکنند، اما عملکرد آنها کاملاً متفاوت است:
شتابسنج برای اندازهگیری تغییر سرعت خطی یا گرانش طراحی شده. به عبارتی، هر وقت جسمی حرکت کند یا جهت آن نسبت به زمین عوض شود، شتابسنج آن را حس میکند. این سنسور میتواند تشخیص دهد که جسم ثابت است، در حال حرکت است یا زاویهاش نسبت به زمین چطور است.
ژیروسکوپ برای اندازهگیری سرعت چرخش یا تغییر زاویه کاربرد دارد. زمانی که جسمی به دور یکی از محورهای خود میچرخد (مثلاً وقتی گوشی را میچرخانید)، ژیروسکوپ این حرکت چرخشی را با دقت بالا اندازهگیری میکند.
در سنسورهایی مثل MPU6050، از هر دو سنسور استفاده شده تا بتوانیم حرکت، زاویه و موقعیت را بهدقت دنبال کنیم.
چرا در سنسورهایی مثل MPU6050 هر دو با هم هستند؟
در سنسورهایی مثل MPU6050، شتابسنج (Accelerometer) و ژیروسکوپ (Gyroscope) با هم ترکیب میشن تا نقصهای یکدیگر رو جبران کنن و دادههای دقیقتری برای تعیین موقعیت و زاویه فراهم کنن.
شتابسنج میتونه زاویه رو نسبت به جاذبه زمین تخمین بزنه، ولی در حضور شتابهای دینامیکی (مثل حرکت یا ارتعاش) دقتش کاهش پیدا میکنه. از طرف دیگه، ژیروسکوپ نرخ تغییرات زاویهای رو با دقت بالا در کوتاهمدت اندازهگیری میکنه، اما به دلیل درفت (Drift) در طولانیمدت خطا جمع میشه.
ترکیب این دو با استفاده از الگوریتمهایی مثل فیلتر کالمن (Kalman Filter) یا فیلتر مکمل (Complementary Filter) باعث میشه که دادههای شتابسنج برای تصحیح درفت ژیروسکوپ و دادههای ژیروسکوپ برای بهبود دقت در حرکات سریع استفاده بشن. این ترکیب باعث میشه که سنسورهای اینرسی مثل MPU6050 برای کاربردهایی مثل رباتیک، پهپادها و سیستمهای ناوبری بسیار کارآمد باشن.
شناخت اجزای سختافزاری ماژول MPU6050
در مرکز ماژول MPU6050 یک تراشه پیشرفته و کممصرف قرار دارد که شامل ژیروسکوپ سهمحوره، شتابسنج سهمحوره و یک پردازنده دیجیتال حرکت (DMP) است. این ترکیب به ما اجازه میدهد تا چرخش، شتاب ناشی از گرانش زمین و همچنین حرکات ناگهانی مانند ضربه یا لرزش را بهدقت اندازهگیری کنیم. همه این امکانات تنها در یک تراشه کوچک ۴×۴ میلیمتری قرار گرفتهاند
ماژول MPU6050 به یک رگولاتور داخلی ۳.۳ ولت (مدل LD3985) مجهز شده که باعث میشود بتوانید آن را مستقیماً به میکروکنترلرهایی با ولتاژ ۵ ولت، مثل آردوینو، متصل کنید، بدون اینکه نگران آسیب دیدن تراشه باشید. این ماژول بسیار کممصرف است؛ هنگام اندازهگیری تنها حدود ۳.۶ میلیآمپر و در حالت آمادهبهکار فقط ۵ میکروآمپر برق مصرف میکند. این ویژگی، MPU6050 را به گزینهای عالی برای پروژههایی با تغذیه باتری تبدیل کرده است. همچنین روی ماژول یک LED کوچک قرار دارد که هنگام اتصال تغذیه روشن میشود و نشان میدهد ماژول فعال است.
🌀 اندازهگیری شتاب با MPU6050
ماژول MPU6050 دارای یک شتابسنج داخلی است که میتواند شتاب را با دقت بالا در چهار محدوده قابل تنظیم اندازهگیری کند: 2g ، ±4g ، ±8g ، ±16g± . این امکان به کاربر اجازه میدهد تا دقت یا بازه اندازهگیری را بر اساس نیاز پروژه انتخاب کند.
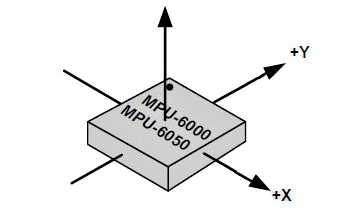
برای ثبت دقیق حرکات، این ماژول به سه مبدل آنالوگ به دیجیتال (ADC) با دقت ۱۶ بیت مجهز شده که میتوانند بهصورت همزمان دادههای شتاب در سه محور X، Y و Z را دریافت و پردازش کنند. این ویژگی، MPU6050 را به گزینهای قدرتمند برای پروژههای حرکتی، رباتیک و پایش موقعیت تبدیل میکند.
🔄 اندازهگیری چرخش با ژیروسکوپ MPU6050
علاوه بر شتابسنج، ماژول MPU6050 به یک ژیروسکوپ داخلی دقیق نیز مجهز است که میتواند میزان چرخش زاویهای را در چهار محدوده قابل تنظیم ±250، ±500، ±1000 و ±2000 درجه بر ثانیه اندازه گیری کند.
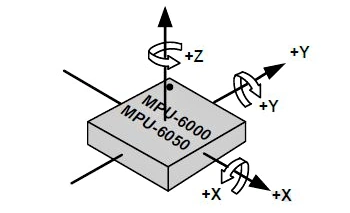
برای ثبت دقیق حرکات زاویهای، این سنسور نیز مانند شتابسنج دارای سه مبدل آنالوگ به دیجیتال ۱۶ بیتی است که بهطور همزمان چرخش در سه محور X، Y و Z را نمونهبرداری میکنند. از ویژگیهای مهم این ژیروسکوپ، قابلیت تنظیم نرخ نمونهبرداری است که از ۳.۹ تا ۸۰۰۰ نمونه در ثانیه قابل تغییر است. این قابلیت آن را برای کاربردهای مختلف از جمله رباتیک، بازیهای واقعیت مجازی و سیستمهای ناوبری بسیار مناسب میسازد.
🌡️ اندازهگیری دما با MPU6050
ماژول MPU6050 به یک سنسور دمای داخلی نیز مجهز است که میتواند دما را در محدودهی -40 تا +85 درجهی سانتیگراد با دقت حدودی ±1 درجه اندازهگیری کند.
اما نکته مهم این است که این سنسور، دمای داخلی تراشه را اندازهگیری میکند، نه دمای محیط اطراف. بنابراین نمیتوان از آن برای کاربردهایی مثل اندازهگیری دمای اتاق استفاده کرد. این اطلاعات دمایی بیشتر برای اصلاح و کالیبره کردن دادههای شتابسنج و ژیروسکوپ یا برای بررسی تغییرات دمایی تراشه به کار میروند.
🔌 رابط I2C و آدرسدهی ماژول MPU6050
ماژول MPU6050 برای ارتباط با آردوینو از رابط I2C استفاده میکند. این رابط تنها به دو سیم نیاز دارد (SDA و SCL) و امکان اتصال چند دستگاه را روی یک باس مشترک فراهم میکندنکته مهم اینجاست که ماژول میتواند با دو آدرس مختلف 0x68 و 0x69 کار می کند.
این قابلیت زمانی مفید است که مثلاً میخواهید دو عدد MPU6050 یا سنسورهای دیگری با آدرس مشابه را به آردوینو متصل کنید.
تعیین آدرس I2C از طریق پین ADO انجام میشود:
➕ افزودن سنسورهای خارجی به MPU6050
یکی از ویژگیهای پیشرفته ماژول MPU6050 این است که میتوانید با اضافه کردن سنسورهای خارجی، دقت و عملکرد آن را افزایش دهید. این سنسورها میتوانند از طریق پینهای XDA و XCL که مربوط به یک رابط I2C مستقل دوم هستند، به ماژول متصل شوند.
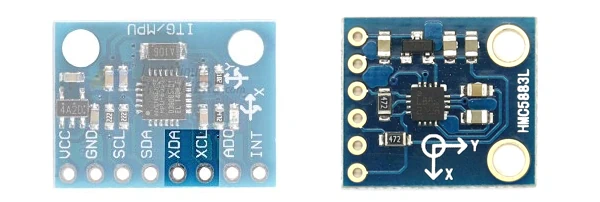
رایجترین استفاده از این پینها، اتصال یک قطبنما (مانند HMC5883L) است که میتواند میدان مغناطیسی زمین را در سه محور اندازهگیری کند. ترکیب این سه سنسور (شتابسنج + ژیروسکوپ + قطب نما) به شما یک IMU با 9 درجه آزادی (9DOF) میدهد. این ویژگی برای پروژههایی مانند رباتیک پیشرفته، سیستمهای ناوبری، پرواز پهپادها و تشخیص دقیق موقعیت بسیار ارزشمند است.
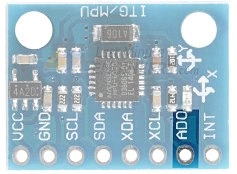
📌 پینهای ماژول MPU6050 و کاربرد آنها
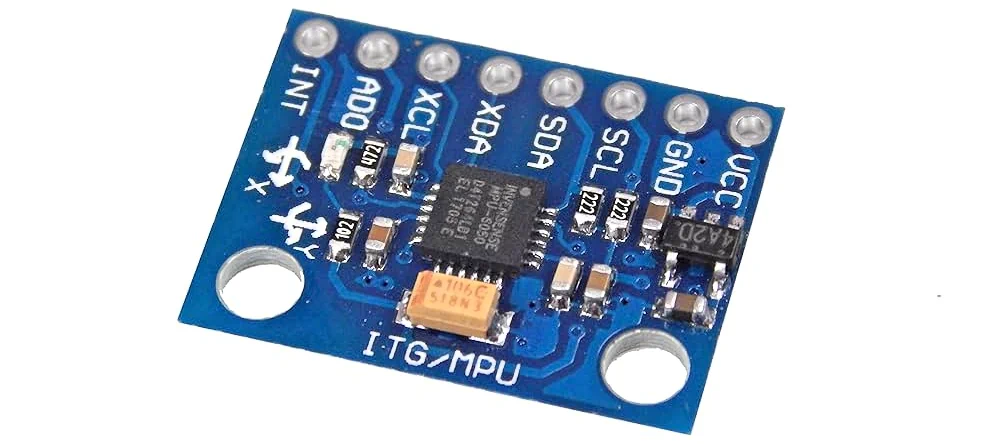
برای راهاندازی اولیهی ماژول MPU6050 تنها به ۴ پایه نیاز است: پایهی VCC برای تغذیه، GND برای زمین، و دو پایهی SCL و SDA برای ارتباط I2C با آردوینو. با همین اتصالات ساده، ماژول بهراحتی فعال شده و دادههای شتابسنج و ژیروسکوپ را ارسال میکند. با این حال، ماژول در مجموع دارای ۸ پایه مهم است که هرکدام کاربرد خاص خود را دارند و در ادامه به معرفی آنها میپردازیم.
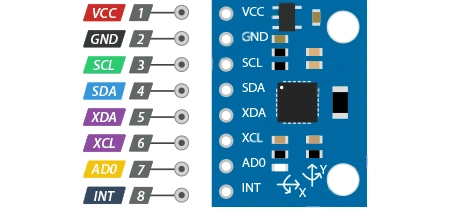
VCC پین تغذیه ماژول است.
GND پین اتصال به زمین.
SCL پین کلاک سریال برای رابط I2C.
SDA پین داده سریال برای رابط I2C.
XDA خط داده I2C خارجی، برای اتصال سنسورهای خارجی مانند مغناطیسسنج.
XCL خط کلاک I2C خارجی.
AD0 برای تغییر آدرس I2C ماژول استفاده میشود.
INT این ماژول میتواند طوری برنامهریزی شود که هنگام تشخیص حرکات خاص، زوم، اسکرول، ضربه یا لرزش، سیگنال وقفه تولید کند.
در این آموزش چه چیزهایی یاد میگیری؟
اگر دوست داری راهاندازی این ماژول رو بهصورت کامل و حرفهای یاد بگیری، مخصوصاً با پیادهسازی فیلتر کالمن برای حذف نویز و دقیقکردن دادهها، پیشنهاد میکنم آموزش کامل ما رو از دست ندی. در این آموزش، مرحلهبهمرحله نحوه راهاندازی، دریافت دادهها، و پیادهسازی فیلتر کالمن آموزش داده شده تا بتونی از این ماژول در پروژههای واقعی و دقیق استفاده کنی. اگه میخوای از سطح مبتدی فراتر بری و دادههایی دقیق، روان و قابلاعتماد از MPU6050 بگیری، این آموزش دقیقاً همون چیزیه که دنبالش هستی.
1 – آشنایی با فیلتر کالمن و پیادهسازی آن برای MPU6050
فیلتر کالمن (Kalman Filter) یکی از قدرتمندترین الگوریتمها برای حذف نویز و ترکیب دادهها از منابع مختلف سنسوری است. در ماژول MPU6050 که شامل شتابسنج و ژیروسکوپ است، این فیلتر کمک میکند تا خطای ناشی از هرکدام از این سنسورها به حداقل برسد و زاویه دقیقتری از موقعیت جسم به دست بیاید.
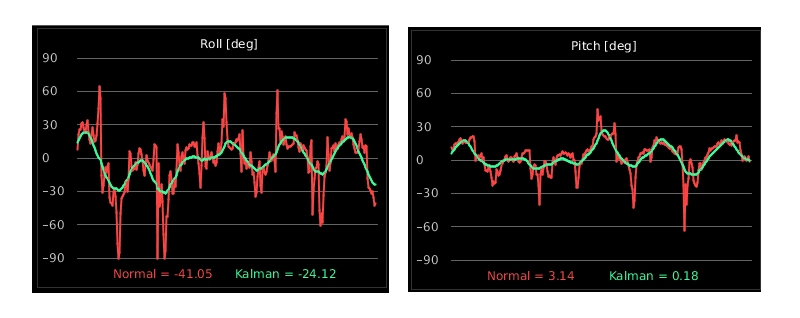
در این بخش از آموزش، به زبان ساده و کاملاً کاربردی با مفاهیم پایه فیلتر کالمن آشنا میشوی. سپس گامبهگام نحوه پیادهسازی آن روی آردوینو را یاد میگیری تا بتوانی خروجیهای دقیقتری از MPU6050 دریافت کنی. استفاده از این فیلتر در پروژههایی مانند ربات تعادلی، سیستم موقعیتیابی و حتی بازیهای حرکتی میتواند تفاوت چشمگیری در عملکرد ایجاد کند.
2 – آشنایی با DMP داخلی ماژول MPU6050 و استفاده از آن برای پردازش حرکتی
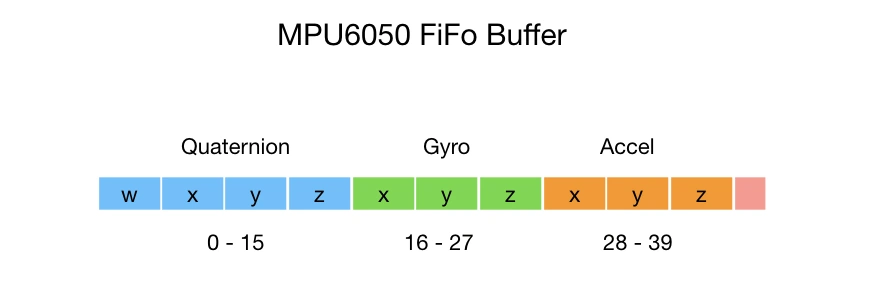
در قلب ماژول MPU6050، یک واحد پردازنده حرکتی دیجیتال به نام DMP (Digital Motion Processor) قرار دارد. این پردازنده داخلی میتواند دادههای شتابسنج و ژیروسکوپ را بدون دخالت مستقیم میکروکنترلر پردازش کند و خروجیهایی مثل زاویههای Pitch، Roll و Yaw را با نویز بسیار کم و دقت بالا تولید کند.
استفاده از DMP مزایای زیادی دارد:
-
کاهش قابل توجه بار پردازشی روی آردوینو
-
دقت بالاتر در محاسبه زوایا
-
استفاده از فیلترهای داخلی برای حذف نویز
-
امکان تولید سیگنال وقفه (Interrupt) در هنگام وقوع حرکات خاص یا تغییرات ناگهانی
نکته بسیار مهم این است که با فعالسازی DMP ، عملاً دیگر نیازی به پیادهسازی فیلتر کالمن یا فیلتر مکمل بهصورت دستی نخواهید داشت. DMP خودش بهصورت سختافزاری و بهینه این فیلترها را پیادهسازی کرده و خروجیهای آماده و فیلترشده را در اختیار شما قرار میدهد. به همین دلیل، در پروژههایی که نیاز به دادههای زاویهای دقیق و پردازش بلادرنگ دارند، استفاده از DMP میتواند انتخابی هوشمندانه باشد.
💡 خبر خوب اینجاست که در همین آموزش، کار با DMP و نحوه فعالسازی و دریافت دادههای آماده از آن را بهصورت کامل و مرحلهبهمرحله یاد میگیری. همه چیز آماده است تا خیلی سریع از دادههای دقیق و روان استفاده کنی!
3 – آشنایی با فیلتر مکمل و استفاده از آن برای ترکیب دادههای سنسور MPU6050
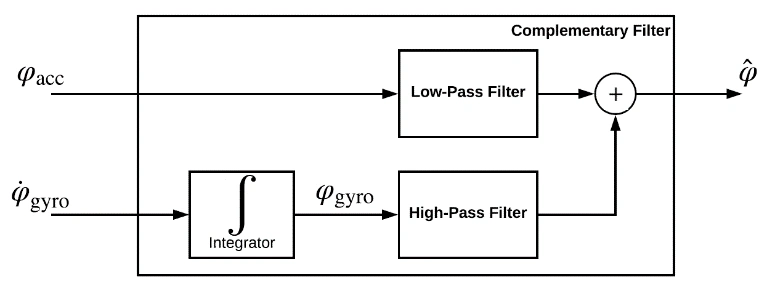
فیلتر مکمل (Complementary Filter) یکی از سادهترین و کارآمدترین روشها برای ترکیب دادههای ژیروسکوپ و شتابسنج است تا بتوان زاویهی دقیقتری از موقعیت جسم به دست آورد.
ژیروسکوپ میتواند نرخ چرخش زاویهای را با دقت بالا اندازهگیری کند، ولی در طول زمان دچار خطای تجمعی (Drift) میشود. از طرفی، شتابسنج میتواند زاویه را نسبت به جاذبه زمین تخمین بزند، ولی در برابر حرکت و لرزشهای سریع، عملکرد ناپایداری دارد. فیلتر مکمل با ترکیب هوشمند این دو داده، مزایای هر دو سنسور را با هم ترکیب کرده و خروجی روان و دقیقتری تولید میکند.
فیلتر مکمل در واقع یک توازن ساده بین «پاسخ سریع ژیروسکوپ» و «پایداری شتابسنج» برقرار میکند و به همین دلیل برای بسیاری از پروژههای مبتدی تا نیمهحرفهای، انتخاب بسیار خوبی است.
در این آموزش، با اصول عملکرد این فیلتر آشنا میشی، فرمول سادهی اون رو یاد میگیری و بعدش بهصورت عملی، فیلتر مکمل رو روی دادههای خام MPU6050 پیادهسازی میکنیم تا بتونی زاویه دقیقتری به دست بیاری. اگر دنبال یک راهحل ساده ولی مؤثر هستی، فیلتر مکمل میتونه بهترین نقطه شروع باشه.
4 – راهاندازی و خواندن دادهها از MPU6050 بهصورت مستقیم با رجیسترها
در این بخش از آموزش، به جای استفاده از کتابخانههای آماده، مستقیماً با رجیسترهای داخلی MPU6050 کار میکنیم و قدم به قدم راهاندازی و خواندن اطلاعات مختلف سنسور را با پروتکل I2C انجام میدهیم. این روش باعث میشود درک بسیار عمیقتری از ساختار و نحوه عملکرد MPU6050 پیدا کنید و بتوانید در پروژههای حرفهایتر با دقت بالاتری سنسور را کنترل نمایید.

در این مسیر، موارد زیر را بهصورت کامل آموزش میدهیم:
-
خواندن دادههای خام شتابسنج
-
خواندن دادههای خام ژیروسکوپ
-
اندازهگیری دمای داخلی سنسور
-
کالیبره کردن ژیروسکوپ برای حذف نویز و خطاهای پایه
-
تبدیل دادههای خام شتابسنج به واحد g
-
تبدیل دادههای خام ژیروسکوپ به درجه بر ثانیه
-
محاسبه زاویه Roll و Pitch تنها با استفاده از شتابسنج
-
بهبود محاسبه زاویهها با اعمال کالیبراسیون دستی
این بخش از آموزش به شما کمک میکند تا بدون وابستگی به کتابخانههای آماده، کنترل کامل روی دادههای خروجی سنسور داشته باشید و آنها را مطابق نیاز خود فیلتر، تبدیل یا تحلیل کنید.
5 – راهاندازی سریع MPU6050 با استفاده از کتابخانههای آماده
برای آن دسته از افرادی که میخواهند در سریعترین زمان ممکن و با کمترین میزان کدنویسی، سنسور MPU6050 را راهاندازی کنند، ما از کتابخانههای معتبر و معروف آردوینو استفاده کردهایم. با این روش، بدون نیاز به درگیری با جزئیات رجیسترها، میتوانید به سرعت از دادههای شتابسنج، ژیروسکوپ و سایر قابلیتهای ماژول استفاده کنید و پروژههای کاربردی و حرفهای طراحی نمایید.

در این بخش، موارد زیر را آموزش میدهیم:
-
خواندن دادههای خام شتابسنج و ژیروسکوپ
-
کالیبره کردن دقیق سنسور برای کاهش خطاها
-
محاسبه زاویههای Roll و Pitch از شتابسنج
-
محاسبه زاویهها با استفاده از ژیروسکوپ
-
اعمال فیلتر مکمل برای ترکیب دادههای ژایرو و شتابسنج
-
تشخیص حرکات و ضربههای ناگهانی
-
محاسبه دقیق Pitch، Roll و Yaw با استفاده از ژیروسکوپ
-
تشخیص سقوط آزاد یا Free-Fall
-
اندازهگیری دمای داخلی ماژول
استفاده از این کتابخانهها در عین سادگی، دقت بالایی دارند و به شما کمک میکنند در کمترین زمان ممکن پروژه خود را به نتیجه برسانید.
6 – تشخیص سقوط آزاد (Free-Fall Detection) با MPU6050
MPU6050 قابلیت ویژهای برای تشخیص حالت سقوط آزاد دارد؛ یعنی زمانی که ماژول در حال سقوط بدون هیچ شتابی به جز شتاب گرانش باشد. این قابلیت در پروژههایی مانند دستگاههای ایمنی، رباتها و سیستمهای هشدار سقوط کاربرد فراوانی دارد.
در این بخش آموزش، یاد میگیریم چگونه با استفاده از تنظیمات داخلی ماژول و خواندن دادهها، سقوط آزاد را شناسایی کنیم و بر اساس آن برنامهریزیهای لازم را انجام دهیم.
محتوای ارائه شده در این آموزشی شامل موارد زیر است
-
🎥 فیلم آموزشی جامع (۱۲۰ دقیقه) شامل توضیح مفاهیم و نکات کاربردی
-
🧠 توضیح خطبهخط همه مثالها برای درک بهتر برنامهنویسی
-
💻 سورسکد ۲۱ مثال عملی و کاربردی
-
📚 تمامی کتابخانههای مورد نیاز بههمراه آموزش نصب
-
📄 دیتاشیت کامل سنسور و نقشه رجیسترهای آن
-
📐 شماتیک مدار بهصورت PDF و فایل قابل ویرایش Fritzing